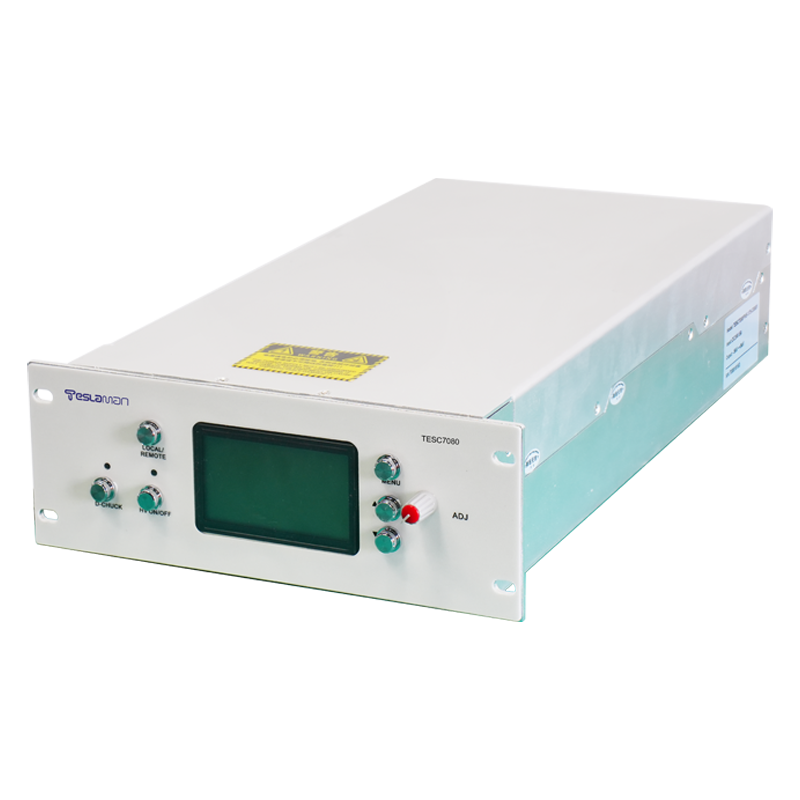


450kV高压电源用于静电悬浮轴承的电场力控制研究
静电悬浮轴承作为一种非接触式支撑技术,在高真空、超高速旋转机械及空间应用等领域展现出独特优势。与传统的磁悬浮相比,静电悬浮不存在涡流损耗和铁磁饱和问题,尤其适用于极高转速和特殊环境。其核心原理在于通过高压电源在定子电极与转子之间建立强静电场,产生的库仑力实现对转子的无接触悬浮与定位。而450kV这一电压等级的高压电源的应用,标志着该项技术向更高承载力、更大间隙和更精密控制方向迈出了关键一步。
静电轴承的承载力与电极间电压的平方成正比,与间隙的平方成反比。因此,要获得足够的悬浮力,要么减小间隙(带来制造和稳定性的挑战),要么大幅提升电压。采用450kV高压电源,可以在相对较大的机械间隙(例如毫米级)下获得可观的电场力,这显著降低了系统对机械精度的苛刻要求,提高了工程实现的可行性,并增强了系统对振动和热变形的鲁棒性。
然而,将如此高的电压用于悬浮控制,带来了远超常规静电轴承(通常工作在数十千伏)的复杂挑战。首要问题是绝缘与放电。在450kV下,电极边缘、支撑结构及真空腔体内的任何微小毛刺或污染物都可能导致场致发射或局部放电,不仅破坏电场分布,更可能引发持续电弧,损坏电极和电源。因此,电极设计必须采用严格的电场均化技术,如大型等直径面、优化边缘曲率半径,并使用高强度、高真空兼容的绝缘材料(如特种陶瓷或聚酰亚胺)进行精密隔离。电源本身也需具备极快的短路保护能力和低存储能量,以在发生闪络时迅速切断并限制放电破坏能量。
其次,是悬浮力的精密控制问题。静电悬浮本质上是一个开环不稳定的系统,必须依赖实时检测转子位移并快速调节各电极电压来实现稳定悬浮。在450kV的高压下,电源的调节动态性能至关重要。传统的线性高压放大器难以在此电压等级实现快速响应,而开关式电源又面临输出纹波干扰控制精度的问题。因此,研究多采用基于高频逆变和倍压电路组合的方案,通过调节逆变前级的脉宽或频率来快速控制最终高压输出。电源的电压调节分辨率需要达到百伏甚至十伏量级,这意味着对数百千伏总电压的调节精度需优于万分之一,对电源的闭环控制算法和反馈测量精度提出了极致要求。
此外,多自由度解耦控制是另一大难点。一个多电极轴承系统,每个电极的高压电源输出需要根据转子的多维位移误差进行独立且协同的调整。这就要求多个450kV高压电源通道之间具备高度的同步性和隔离性。通常采用分布式架构,由一个高速中央控制器通过光纤发送指令,控制多个独立的高压模块。每个模块的本地控制器需精确执行电压指令,并将自身的状态信息(如实际输出电压、电流、故障标志)实时反馈。控制算法的核心在于,如何在高电压系统固有的响应延迟和电气时间常数约束下,设计出能抑制转子高频振动、抵抗外部扰动的先进控制器(如自适应控制或鲁棒控制)。
最后,系统的长期稳定性与可靠性研究不可或缺。450kV高压下的长期运行,可能面临绝缘材料的老化、电极表面的缓慢变化(如吸附气体、微观放电导致的材料迁移)等问题,这些都会微妙地改变电场分布和力-电压特性。因此,电源系统需要集成先进的在线监测功能,如局部放电检测、泄漏电流监测等,为控制系统提供前瞻性的补偿参数,实现智能维护。
总而言之,450kV高压电源在静电悬浮轴承中的应用,是高压技术、精密机械、自动控制与材料科学深度交叉的前沿课题。它不仅仅是为系统提供能量,更是实现精密力学控制的执行末端。其每一次电压输出的微小变化,都直接转化为对悬浮物体位置与姿态的精准调控。这项研究的深入,不仅推动着超高速离心机、飞轮储能、空间惯性指向装置的发展,也为极端条件下非接触操纵技术奠定了重要的理论与工程基础。