

塑料分选高压电源在智能回收机器人静电场自适应中的部署
智能回收机器人是现代废物回收系统的重要组成部分,能够自动识别、分拣和处理各类可回收材料。塑料分选是回收过程中的关键环节,需要将混合塑料按类型分离,实现资源的高效回收利用。静电分选技术利用不同塑料在静电场中的荷电特性差异,实现塑料的分类分离。高压电源为静电分选系统提供静电场,其输出特性直接影响分选效果。智能回收机器人需要根据物料特性自适应调整电场参数,实现最优分选效果。
智能回收机器人的工作流程包括物料识别、抓取、分选和收集等步骤。视觉识别系统通过摄像头和图像处理算法识别物料的类型、形状和位置。机械臂根据识别结果抓取物料并放置到分选区域。静电分选系统根据物料特性施加合适的电场,实现物料分离。整个过程需要高度的自动化和智能化,减少人工干预。
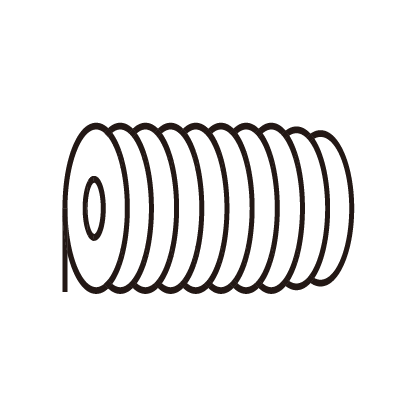
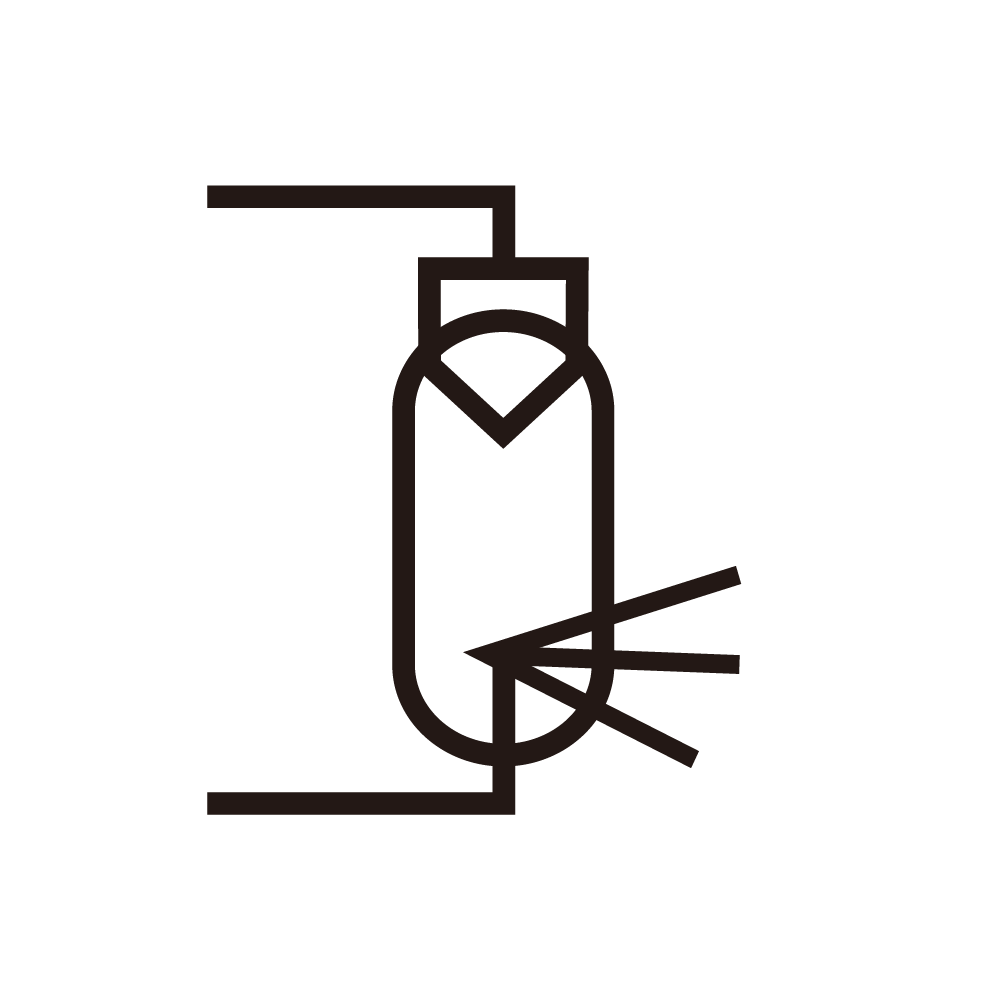
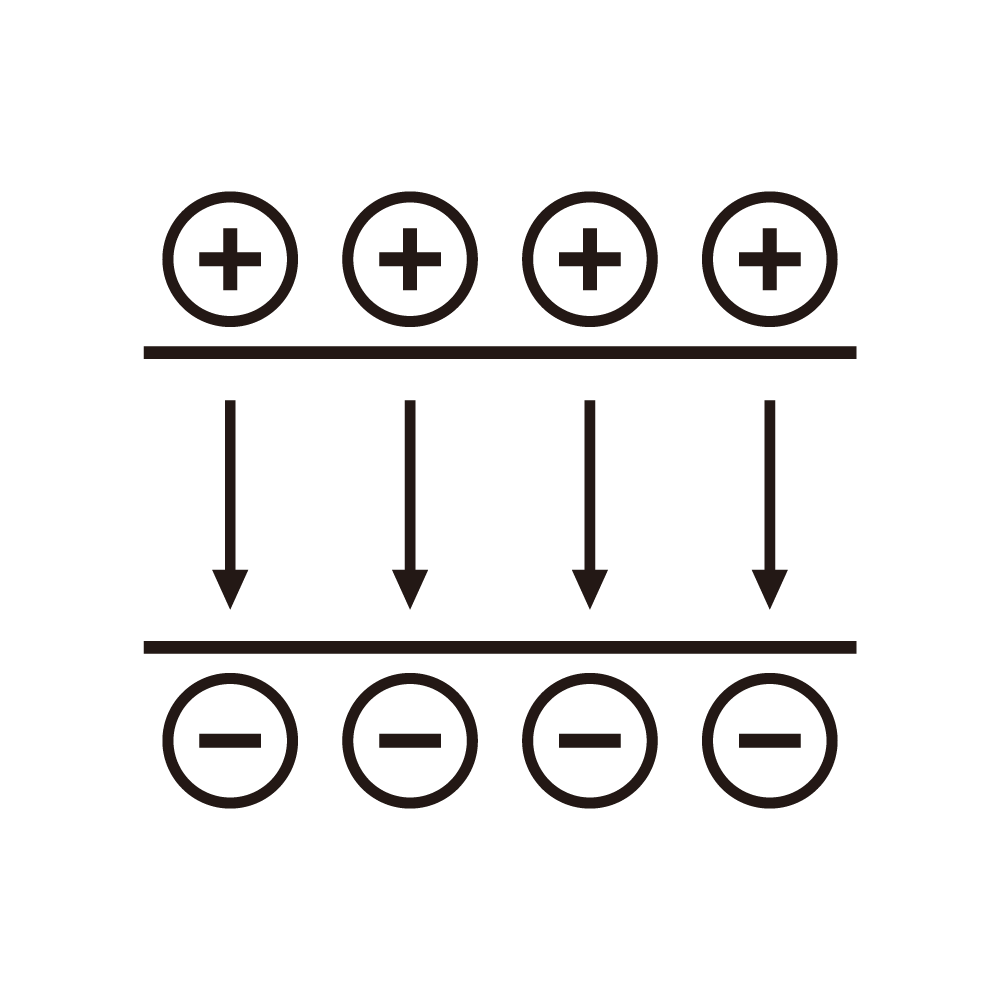
静电分选的基本原理是利用电晕放电使塑料粒子带电。静电极板在高压作用下产生电晕放电,使周围空气电离。塑料粒子通过电晕区域时捕获离子而带电,带电粒子在静电场中运动,根据电荷特性和物理性质的差异实现分离。不同类型的塑料具有不同的介电常数、电导率和密度,在静电场中的运动轨迹不同。
静电场自适应是指根据物料特性动态调整电场参数。智能回收机器人处理的物料来源复杂,不同批次的塑料可能具有不同的物理特性。固定的电场参数难以适应物料变化,分选效果不稳定。自适应系统通过监测物料特性或分选效果,动态调整高压电源的输出电压,优化分选效果。
物料特性监测是自适应控制的基础。监测方法包括光学检测、电学检测和重量检测等。光学检测利用摄像头和图像处理技术,识别塑料的类型、颜色和形状。近红外光谱检测可以识别塑料的化学成分,区分不同类型的塑料。电学检测利用电容或电感传感器,测量物料的介电常数或电导率。重量检测利用称重传感器,测量物料的密度。多种检测方法可以组合使用,提高识别准确性。
高压电源的输出特性需要支持自适应调节。电源需要提供可调的高压输出,电压范围通常在数十千伏到数百千伏之间。电压调节精度影响电场强度的控制精度,调节精度通常要求达到百分之一以内。电压调节速度影响自适应调节的响应速度,需要根据物料变化速度选择。电源还需要提供稳定的输出,电压波动会影响分选效果的稳定性。
控制算法是自适应调节的核心。控制算法根据监测数据计算最优电场强度。简单的控制算法如查表法,根据物料类型选择预设的电场强度。复杂的控制算法如模型预测控制,建立物料特性与分选效果的数学模型,优化电场强度设置。机器学习算法可以从历史数据中学习最优控制策略,实现智能调节。强化学习可以通过试错学习最优策略,适应未知环境。
分选效果评估对自适应控制很重要。分选效果通常用纯度和回收率两个指标评价。纯度是指产品中目标塑料的含量比例,纯度越高产品质量越好。回收率是指目标塑料被回收的比例,回收率越高资源利用率越高。在线监测可以实时评估分选效果,反馈给控制系统进行参数调整。离线分析可以定期验证分选效果,校准控制系统。
多级分选提高分离效果。智能回收机器人可能需要处理多种类型的塑料,单级分选难以实现完全分离。多级分选通过多个分选单元串联或并联,实现逐步分离。每个分选单元可以独立调节电场强度,适应不同阶段的物料特性。高压电源需要支持多通道输出,各通道独立控制。多级分选的控制策略需要协调各级的参数设置,实现整体优化。
机器人系统的集成需要考虑多个方面。高压电源需要与机器人的控制系统通信,接收控制指令并反馈状态信息。通信接口可以采用以太网、串行通信或工业总线等标准接口。电源的体积和重量需要适合机器人安装,不能影响机器人的运动性能。电源的散热需要考虑机器人内部空间有限,可能需要液冷或高效风冷方案。
安全防护是机器人系统的重要考量。智能回收机器人可能在有人环境下工作,需要确保安全。高压电源需要配备完善的安全保护功能,包括输出限流、过压保护和放电保护等。防护罩和安全联锁可以防止人员接触高压部件。放电保护功能在分选结束后释放残余电荷,避免意外放电。紧急停机功能可以在异常情况下立即停止设备运行。设备需要符合工业机器人的安全标准。
维护便利性影响设备的可用性。智能回收机器人需要长时间运行,设备故障会影响回收效率。高压电源应采用模块化设计,便于故障诊断和快速维修。自诊断功能可以监测电源状态,预测潜在故障,实现预防性维护。备用电源模块可以快速更换,减少停机时间。远程监控功能可以实现设备状态的实时监测,及时发现潜在问题。


